本篇博客的内容是对偶线性规划(Dual LP),是这学期选修的一门课里的内容(腊月里考试,唉),记下来当作是复习了。
首先,一个线性规划问题包含输入,输出,约束条件以及目标函数这四个部分,它的基本形式是这样的:
Input: $A$, $b$, $c$
Output: $x \in \mathbb{R}$
Constraint: $A \cdot x \geq b$
Objective funtion: $\min(c \cdot x)$
那么它的对偶线性规划为:
Input: $A$, $b$, $c$
Output: $y \in \mathbb{R}$
Constraint: $A^T \cdot y \leq c^T$
Objective funtion: $\max(b^T\cdot y)$
为了方便表示,第一个线性规划问题称为LP1,它的对偶线性规划问题为LP2。同时,LP1也可以看做是LP2的对偶。
LP1和LP2之间有如下的特性:
1. LP1和LP2的目标函数的最优值相同
如下图所示,蓝色是LP2的目标函数值的范围,红色部分是LP1的目标函数值的范围,二者的最优值Opt是相同的。换句话说,如果LP1和LP2的目标函数值相同,那么该值即为最优值。

2. 互补松弛性(complementary slackness)
如果LP2的解$y$中的某个变量$y_i$的值大于0,那么其在LP1中对应的约束条件中的符号应为等号,即: $\sum_{j=1}^{n} a_{ij}x_j = b_i$,此时我们称这个约束是紧的。假如$y_i=0$,那么LP1中对应的约束应该取不等号,即:$\sum_{j=1}^{n} a_{ij}x_j > b_i$,此时这个约束是松的。
一道例题
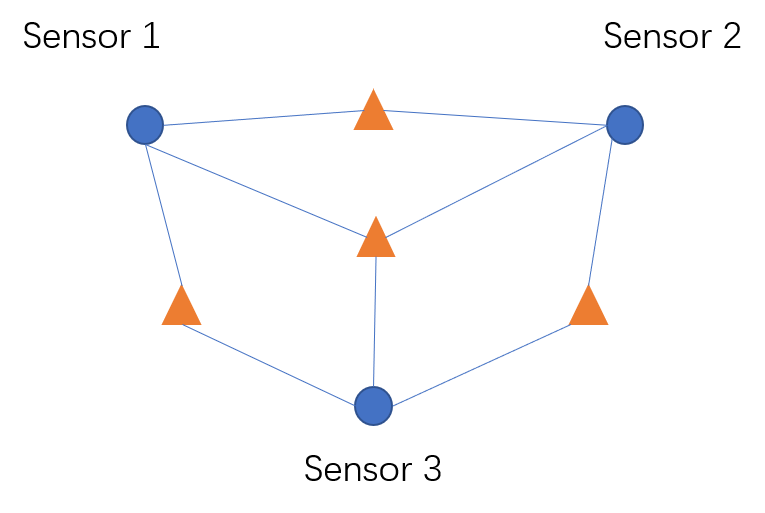
例题来自于课堂的PPT。假设我们有如下图所示的传感器网络,其中圆代表传感器,三角形代表需要检测的目标,一个传感器可以监测所有与其相连的目标。假设每个传感器最多只能使用一个小时,且必须同时监测所有的目标,我们想要最大化监测目标的时间。由图可知,想要同时检测所有的三角形,可选的传感器组合有: $[1,2],[1,3],[2,3],[1,2,3]$。
将其转化为一个线性规划问题:
Input: 传感器集合$S$,对于集合中的每个传感器$s_i \in S$,其所能检测到的目标集合 $T_s$。
Output: 每种能够覆盖所有目标的传感器组合$C_1,…,C_p$的使用时间$t_1,…,t_p$。
Constraint: 每个传感器的使用时间不可以超过一个小时,即对于任意一个传感器$s_i$:
\[\sum_{j:i \in C_j} t_j \leq 1\]Objective Function: $\max(t_1+…+t_p)$
其中,约束条件可以转化为$Ax \leq b$的形式,其中$A$ 中的任一元素$a_{ij}$ 表示传感器$s_i$否属于组合$C_j$,如果属于,$a_{ij}$为1,反之为0;$x=[t_1,t2,…,t_p]^T$, $b = [1,1,…,1]^T$。而目标函数可以写为$\max (c*x)$,其中$c = [1,1,…,1]$。上面这张图中共有3个传感器以及3种可用的组合,求出的最优解为$x=[0.5,0.5,0.5,0]$,目标函数的最优值为1.5。
当传感器以及监测目标的数量变得非常大的时候,方程的数量也会变多。此时我们可以借助它的对偶线性规划来进行求解。即将约束条件和目标函数转换成如下形式:
Constraint: $A^T y \geq c^T$
Objective Function: $\min (b^Ty)$
这样方程的数量就变成了可选组合$C$的数量。我们可以通过一种迭代的方法(Garg-Konemann算法)来求对偶LP的可行解。该算法的步骤如下:
- 将$x$中每个元素的初始值设为0,$y$中每个元素的初始值设为$\delta$,$\delta$是一个很小的值。
- 找出最小化$a_{1i}y_1+a_{2i}y_2+…+a_{ni}y_n$ 的$i’$。此时,我们可以将第$i’$个约束条件看做是最有问题的约束。
- 如果$a_{1i’}y_1+a_{2i’}y_2+…+a_{ni’}y_n \geq 1$ ,那么所有约束条件都满足了(因为其他不等式的左侧只会比它大),此时我们获得了一个可行解,算法结束。
- 如果第$i’$个约束没有满足,那么对于所有令$a_{ji’}=1$的$j$,我们令$y_{j} \leftarrow (1+\theta)y_j$。
- $x_{i’} \leftarrow x_{i’}+\tau$
- 跳转到第二步。
其中$\theta,\delta,\tau$这三个参数需要提前设定。其中$\tau$和$\delta$的设置可以参考以下公式(证明略):
\[\tau = \frac{\ln(1+\theta)}{\ln{1+\theta}-\ln(\delta)}\] \[\delta = (1+\theta)((1+\theta)n)^{-\frac{1}{\theta}}\]一般情况下,问题的解只会包含可选组合中的一小部分,因此就算传感器数量较多,也不会迭代太多次数。
以下称原问题为LP1,其对偶线性规划为LP2。
1. 求得最优解
以上的算法可以求出线性规划的一个可行解SOL。如果想要求得最优解OPT,还需要进一步的分析。
我们可以将LP2的约束条件改写为:
\[f(y) = \underset{i}{\mathrm{\ min}}(a_{1i}y_1+a_{2i}y_2+...+a_{ni}y_n) \geq 1\]如果$f(y)>1$,说明$y$还可以变得更小。因此,最优解对应的$f(y)$值为1。由此,我们可以将LP2的目标函数转换为:$\underset{i}{\mathrm{\ min}} \frac{(z_1+…+z_n)}{f(z)}$。(证明略)
对于给定的$\delta,\theta,\tau$,有如下的两条引理(证明略):
-
Garg-Konemann算法的迭代次数 $\geq \ln(\frac{1}{n\delta}) \cdot \frac{OPT}{\theta}$
-
对应的LP1的可行解: $SOL \geq \tau \ln(\frac{1}{n\delta}) \cdot \frac{OPT}{\theta}$
将$\tau = \frac{\ln(1+\theta)}{\ln{1+\theta}-\ln(\delta)}$以及$\delta = (1+\theta)((1+\theta)n)^{-\frac{1}{\theta}}$代入可得:
-
迭代次数 $\geq \frac{1}{\theta^2}n\ln n$
-
可行解: $SOL \geq \frac{1-\theta}{1+\theta}OPT$
由此可知,$\theta$的取值越小,SOL越接近OPT,但是算法所需的迭代次数会增加。如果不限制计算时间的话,理论上我们可以获得最优解OPT。
2. 进一步简化问题?
当传感器数量庞大的时候,Garg-Konemann算法的第2步需要耗费大量的时间。为了节约时间,可以将$f(y)$等价为:
\[f(y) = \underset{i}{\mathrm{\ min}}(a_{1i}y_1+a_{2i}y_2+...+a_{ni}y_n) = \underset{i}{\mathrm{\ min}} \sum_{j\in C_i}y_j\]因此,G-K算法的第2步就变成了:找到一个传感器集合$C_i’$,令$\sum_{j\in C_i’}y_j$最小。这样的话,求传感器最大监测时间的问题可以被转换为一个目标点覆盖问题(target coverage problem)。该问题存在一个能够保证$SOL \leq (\ln T+1) \cdot OPT$的近似算法,其中$T$是待监测目标的数量。因此,改动之后,LP1的SOL与OPT之间的关系为:$SOL \geq \frac{1-\theta}{1+\theta} \cdot \frac{1}{\ln T + 1} \cdot OPT$。