假设我们从两个不同的视角拍摄同一个物体的照片,那么这个物体在两张照片中所显示的形状是不一样的。举一个很简陋,啊不,简单的例子:假设桌子上放了一本书,那么从书的正上方俯视这本书,书的形状应该是一个矩形(下图左侧);但是如果我们蹲在桌子前看向这本书(类似于平视),那么此时我们看到的书的形状应该类似于一个梯形,离得远的那条边看上去会小一些(下图右侧)。
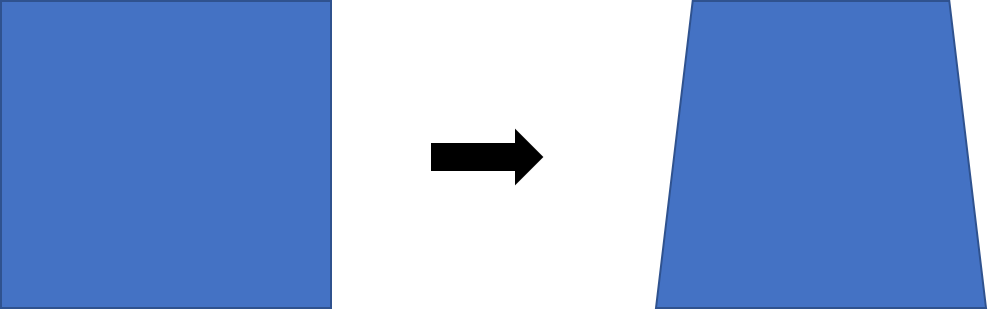
虽然我们看向的是同一本书,但是由于视角的变化,我们看见的书的形状不同。单应变换就是将俯视图里的点映射到平视图里的对应位置(反过来也行)的过程,也就是从一个视角映射到另一个视角的过程。所以单应变换也可以称为视角变换(perspective transformation)。
单应变换可以用矩阵乘法实现,可以把它理解为采用其次坐标系的仿射变换。仿射变换就是线性变换+平移。这里提一下两种变换的重要的性质:
-
两条平行的线在经过仿射变换之后依旧是平行的。
-
在同一条线上的点经过单应变换后依旧在同一条线上。
举个例子,二维的仿射变换是这样的:
\[\left[ \begin{matrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ 0 & 0 & 1 \end{matrix} \right] * \left[ \begin{aligned} x_1 \\ y_1 \\ 1\\ \end{aligned} \right] = \left[ \begin{aligned} x_2 \\ y_2 \\ 1\\ \end{aligned} \right]\]而单应变换是这样的:
\[\left[ \begin{matrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & 1 \end{matrix} \right] * \left[ \begin{aligned} x_1 \\ y_1 \\ 1\\ \end{aligned} \right] = \left[ \begin{aligned} u \\ v \\ w\\ \end{aligned} \right] = \frac{1}{w} \left[ \begin{aligned} x_2 \\ y_2 \\1\\ \end{aligned} \right]\]关于单应变换矩阵为什么长这样,可以参考这篇博客,里面很详细地介绍了单应变换矩阵是如何产生的,这里就不做赘述了。
求解单应变换矩阵
我们可以发现,3×3的单应变换矩阵中有8个未知数,那么解得他们至少需要8个等式,因此,我们需要至少4个点在变换前后的$(x,y)$坐标。如果我们知道一张图片的四个顶点的坐标的话,那么正好能够进行求解。
将上面提到的等式的左侧展开,可以得到如下的结果:
\[\begin{align} x_1*a_{11}+y_1*a_{12}+a_{13} = u \\ x_1*a_{21}+y_1*a_{22}+a_{23} = v\\ x_1*a_{31}+y_1*a_{32}+ 1 = w \end{align}\]由于$x_1 = \frac{u}{w}$,$x_2 = \frac{v}{w}$,我们可以将前2个等式的左右两侧同时除以w,得到:
\[\frac{x_1*a_{11}+y_1*a_{12}+a_{13}}{x_1*a_{31}+y_1*a_{32}+ 1} = x_2 \\ \frac{x_1*a_{21}+y_1*a_{22}+a_{23} }{x_1*a_{31}+y_1*a_{32}+ 1}= y_2\]同时乘以分母,再将一些元素移到左边,就可以得到:
\[x_1*a_{11}+y_1*a_{12}+a_{13} - x_1x_2*a_{31} - x_2y_1*a_{32} = x_2 \\ x_1*a_{21}+y_1*a_{22}+a_{23} - x_1y_2*a_{31} - y_1y_2*a_{32} = y_2\]这样整理一下,就可以写出$Ax=b$的矩阵乘法形式了:
\[\left[ \begin{matrix} x_{11} &y_{11}&1&0&0&0&-x_{11}x_{12}&-x_{12}y_{11}\\ 0&0&0&x_{11} &y_{11}&1&-x_{11}y_{12}&-y_{11}y_{12}\\ x_{21} &y_{21}&1&0&0&0&-x_{21}x_{22}&-x_{22}y_{21}\\ 0&0&0&x_{21} &y_{21}&1&-x_{21}y_{22}&-y_{21}y_{22}\\ x_{31} &y_{31}&1&0&0&0&-x_{31}x_{32}&-x_{32}y_{31}\\ 0&0&0&x_{31} &y_{11}&1&-x_{31}y_{32}&-y_{31}y_{32}\\ x_{41} &y_{41}&1&0&0&0&-x_{41}x_{42}&-x_{42}y_{41}\\ 0&0&0&x_{41} &y_{41}&1&-x_{41}y_{42}&-y_{41}y_{42} \end{matrix}\right]* \left[\begin{matrix} a_{11}\\a_{12}\\a_{13}\\a_{21}\\a_{22}\\a_{23}\\a_{31}\\a_{32} \end{matrix}\right] = \left[\begin{matrix} x_{12}\\y_{12}\\x_{22}\\y_{22}\\x_{32}\\y_{32}\\x_{42}\\y_{42} \end{matrix}\right]\]对上述的方程组进行求解,就可以得出单应变换矩阵$H$。
需要注意的是,单应变换是针对于二维坐标的,但有的时候我们处理的坐标系是三维的(将$z$值固定),这个时候对应的4×4的变换矩阵应该长这样:
\[H=\left[\begin{matrix} a_{11} & a_{12}&0&a_{13}\\ a_{21} & a_{22}&0&a_{23}\\ 0 & 0&1&0\\ a_{31} & a_{32}&0&1 \end{matrix}\right]\]要将$z$轴对应的行和列给空出来。